系统管理动态内存
系统本身是一种动态管理内存的方法,和边界标识法的区别是:使用系统管理的存储空间,无论是空闲块还是占用块,大小都是 2 的 n 次幂(n 为正整数)。
例如,系统中整个存储空间为 2m 个字。那么在进行若干次分配与回收后,可利用空间表中只可能包含空间大小为:20、21、22、…、2m 的空闲块。
字是一种计量单位,由若干个字节构成,不同位数的机器,字所包含的字节数不同。例如,8 位机中一个字由 1 个字节组成;16 位机器一个字由 2 个字节组成。
可利用空间表中结点构成
系统中可利用空间表中的结点构成如图 1 所示:
图 1 结点构成
header 域表示为头部结点,由 4 部分构成:
llink 和 rlink 为结点类型的指针域,分别用于指向直接前驱和直接后继结点。
tag 值:用于标记内存块的状态,是占用块(用 1 表示)还是空闲块(用 0 表示)
kval :记录该存储块的容量。由于系统中各存储块都是 2 的 m 幂次方,所以 kval 记录 m 的值。
代码表示为:
typedef struct WORD_b{
struct WORD_b *llink;//指向直接前驱
int tag;//记录该块是占用块还是空闲块
int kval;//记录该存储块容量大小为2的多少次幂
struct WORD_b *rlink;//指向直接后继
OtherType other;//记录结点的其它信息
}WORD_b,head;
在系统中,由于系统会不断地接受用户的内存申请的请求,所以会产生很多大小不同但是都是容量为 2m 的内存块,所以为了在分配的时候查找方便,系统采用将大小相同的各自建立一个链表。对于初始容量为 2m 的一整块存储空间来说,形成的链表就有可能有 m+1 个,为了更好的对这些链表进行管理,系统将这 m+1 个链表的表头存储在数组中,就类似于邻接表的结构,如图 2。
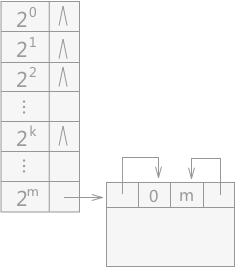
图 2 系统的初始状态
可利用空间表的代码表示为:
#define m 16//设定m的初始值
typedef struct HeadNode {
int nodesize;//记录该链表中存储的空闲块的大小
WORD_b * first;//相当于链表中的next指针的作用
}FreeList[m+1];//一维数组
分配算法
系统的分配算法很简单。假设用户向系统申请大小为 n 的存储空间,若 2k-1 < n <= 2k,此时就需要查看可利用空间表中大小为 2k 的链表中有没有可利用的空间结点:如果该链表不为 NULL,可以直接采用头插法从头部取出一个结点,提供给用户使用;
- 如果大小为 2k 的链表为 NULL,就需要依次查看比 2k 大的链表,找到后从链表中删除,截取相应大小的空间给用户使用,剩余的空间,根据大小插入到相应的链表中。
例如,用户向系统申请一块大小为 7 个字的空间,而系统总的内存为 24 个字,则此时按照系统的分配算法得出:22 < 7 < 23,所以此时应查看可利用空间表中大小为 23 的链表中是否有空闲结点:
如果有,则从该链表中摘除一个结点,直接分配给用户使用;
- 如果没有,则需依次查看比 23 大的各个链表中是否有空闲结点。假设,在大小 24 的链表中有空闲块,则摘除该空闲块,分配给用户 23 个字的空间,剩余 23 个字,该剩余的空闲块添加到大小为 23 的链表中。
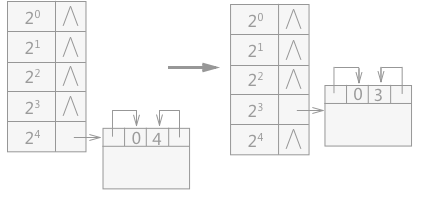
(A)分配前 (B)分配后
图 3 系统分配过程
回收算法
无论使用什么内存管理机制,在内存回收的问题上都会面临一个共同的问题:如何把回收的内存进行有效地整,系统也不例外。当用户申请的内存块不再使用时,系统需要将这部分存储块回收,回收时需要判断是否可以和其它的空闲块进行并。
在寻找并对象时,系统和边界标识法不同,在系统中每一个存储块都有各自的“”,当用户释放存储块时只需要判断该内存块的是否为空闲块,如果是则将其并,然后并的新的空闲块还需要同其进行判断整。反之直接将存储块根据大小插入到可利用空间表中即可。
判断一个存储块的的位置时,采用的方法为:如果该存储块的起始地址为 p,大小为 2k,则其所在的起始地址为:

由于 512 MOD 29=0,所以,512+28=768,及如果该存储块回收时,只需要查看起始地址为 768 的存储块的状态,如果是空闲块则两者并,反之直接将回收的释放块链接到大小为 28 的链表中。
总结
使用系统进行存储空间的管理过程中,在用户申请空间时,由于大小不同的空闲块处于不同的链表中,所以分配完成的速度会更快,算法相对简单。回收存储空间时,对于空闲块的并,不是取决于该空闲块的相邻位置的块的状态;而是完全取决于其块。所以即使其相邻位置的存储块时空闲块,但是由于两者不是的关系,所以也不会并。这也就是该系统的缺点之一:由于在并时只考虑,所以容易产生存储的碎片。
- 随机文章
- 核心危机(核心危机魔石合成攻略)
- 风儿(风儿轻轻的吹)
- 饿了么红包怎么用(饿了么红包怎么用微信支付)
- 儿童教育文章(儿童教育)
- 光遇花手先祖位置(安卓光遇手花先祖)
- 抖音卡(抖音卡顿怎么解决)
- xboxones(xboxone手柄怎么配对主机)
- 兵马俑(兵马俑介绍和历史背景)
- 陈武简历
- 帆船比赛(帆船比赛视频)
- 韩国媳妇和小雪(韩国媳妇和小雪的父亲工资是多少)
- 儋州市第二中学(儋州市第二中学录取分数线)
- 鬼泣5攻略(鬼泣5攻略第三关怎么跳)
- 地球日主题(2020年世界地球日主题)
- 和柳亚子(和柳亚子先生于田)
- yy魔兽(yy魔兽世界)
- 充值卡代理(充值卡代理加盟)
- 拆奶罩
- 东天目山(东天目山景区)
- 杭同(杭同培训中心怎么样)
- 蝙蝠给人类的一封信(蝙蝠给人类的一封信)
- 大松电饭煲(美的大松电饭煲)
- 服饰加盟(服饰加盟店招商)
- 疯狂填字(疯狂填字5)
- 点对点短信息(点对点短信息费是什么意思)
- 河北省大运会(河北省大运会时间)
- 哈利波特官网(哈利波特官网在哪里)
- 骇客神条(骇客神条怎么辨别真假)
- 杜星霖(杜星霖图片)
- 广州晓港公园(广州晓港公园正门图片)